The work in the laboratory integrates the knowledge from biological control methods and rehabilitation with the most advanced engineering, robotics, and computer techniques with the goal of designing rehabilitative, assistive, robotic, and therapeutic technologies for individuals with sensory-motor disabilities.
The research in the Laboratory encompasses human and clinical experimentation in the design and implementation of bio-interface and control technologies for robotics and assistive devices, such as Tongue-based control of assistive robotic arms and exoskeletons, brain-based control of lower limb exoskeletons and brain, myo- and tongue hybrid robotic interfaces. Further, the research focuses on the system design of novel robotic devices such as bio-controlled and bio-inspired soft-exoskeletons and myoelectric and multimodal control of prosthetics and assistive robotics.
The Laboratory has currently several projects in the domain of advanced robotics, bio-exoskeletons, human-machine interfacing, semi-automation, and virtual reality in rehabilitation with an emphasis on neurorehabilitation. Further, the Laboratory investigates the application of Bio-mechanics and Bio-Mechanic modelling in the design of exoskeletons specifically targeting individuals with disabilities, and how robotics can improve sports activities for severely disabled individuals, e.g. facilitation of drone sports for individuals with tetraplegia.
Further, the work includes collaboration with users, clinicians, industry, and the assessment of the use of such robotic technologies in rehabilitation, e.g. studies of neuroplasticity induced by lower limb exoskeletons.
In the laboratory, several robotic devices and bio-interfaces are available such as the JACO2 robot from Kinova Robotics, the SMART HAND, Myo-electric prosthesis a powered wheelchair, Carbon glove/SEM glove, BCI recording equipment, EMG recording equipment, Cameras, etc. for computer vision, Virtual Reality equipment, the iTongue and exoskeletons designed in the related EXOTIC lab.
Development of intraoral inductive tongue-computer interfaces for severely disabled people to control prosthetic, therapeutic and assistive robotic devices. The iTongue, a tongue-computer interface with 18 inductive sensors, is now a commercially available product.
Development of methods to study the effect of therapy and central nervous system reorganization associated with the therapeutic use of prosthetics and robotics.
Assistive personal robotics platform with an exoskeleton using the tongue for intelligent control as a use case (EXOTIC)
Aim: The project focused on developing an efficient Exo interface, an intelligent Exo control method and a user-accepted upper-limb exoskeleton.
Description: This research project paved the way for the EXOTIC – an exoskeleton arm/hand for severely disabled individuals with tongue-based control, novel models for determining user intentions and advanced human-robotic interaction. This project sought to combine the disciplines from four different faculties to create an internationally unique, multidisciplinary platform within assistive and rehabilitative personal robotics.
The research took a holistic approach as all activities were conducted in cooperation with clinical partners and end users, i.e. individuals living with severe disabilities.
Duration: February 2018 → December 2021
Multimodal control of assistive robotic arms for severely disabled individuals (MultiRob)
Aim: To research the use of assistive robotic manipulators (ARMs) for the empowerment of individuals with severe upper limb disabilities, such as individuals with spinal cord injury, multiple sclerosis, amyotrophic lateral sclerosis and cerebral palsy.
Description: The project involves four research studies, which aim to develop novel frameworks for multimodal semiautonomous control of assistive robots:
Myoelectric control of ARMs for users with partial muscular function in the upper extremities.
Intelligent and remote tongue based control of ARMs for users with complete tetraplegia.
Intelligent brain based control of ARMs for users who also have lost control of their tongue.
Intelligent multimodal framework for semiautonomous control of ARMs employing the input modalities from 1, 2 and 3. It will allow for use of both a single input modality and for the use of hybrid input modalities, featuring a gradual change of modality as a disability progresses
Collaborators and Funding:
Scuola Superiore Sant’Anna, Italy
Imperial College London, UK
Aalborg University Hospital
The project is financed by a grant from Danmarks Frie Forskningsfond/FTP.
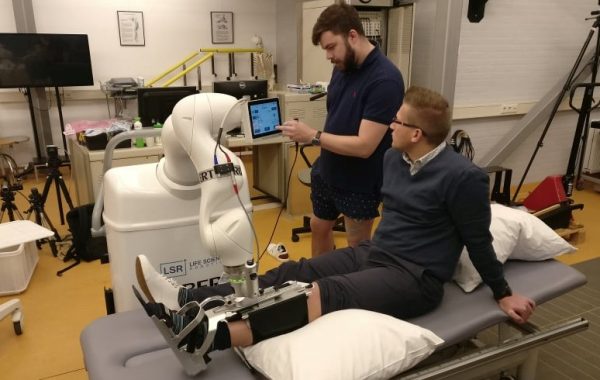
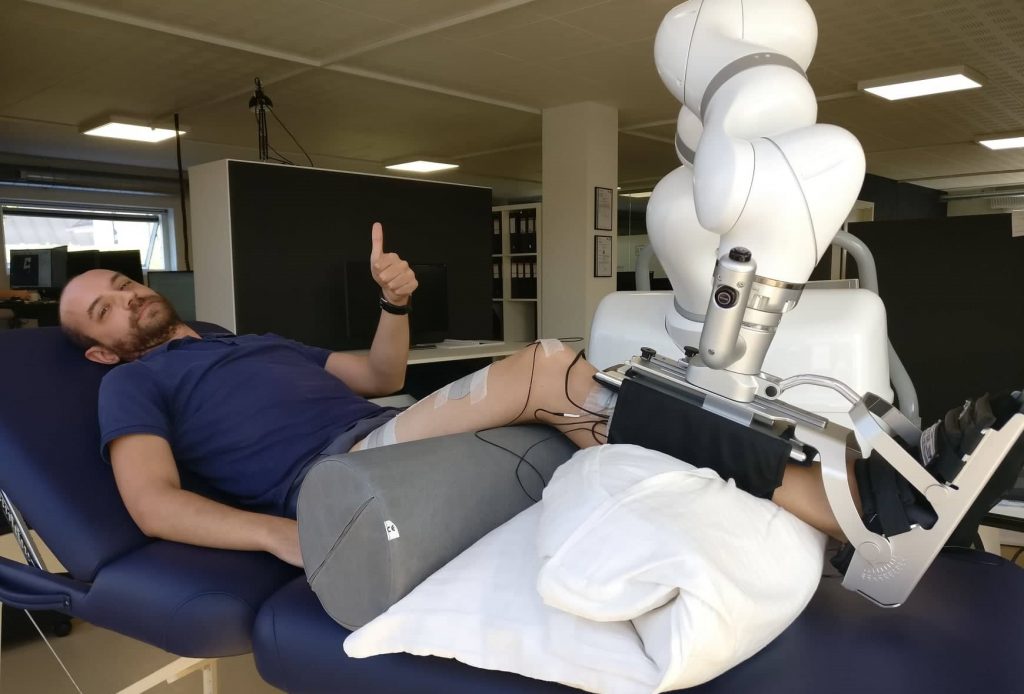
Aim: As early rehabilitation is important to regain the highest possible functionality following a neurological insult, it is problematic that those most severely affected by the insult, remain bedbound due to the severity of their condition. The aim of the ROBERT-SAS project is therefore to develop a novel rehabilitation system based on the ROBERT® rehabilitation robot for early rehabilitation for bedbound patients.
Description: The ROBERT-SAS is a European collaborative project, between a company, Life Science Robotics ApS, our Neurorehabilitation Robotics and Engineering research group at Aalborg University, and Roessingh Research and development in the Netherlands.
The role of our group in this project is among others to develop advancements for the rehabilitation robot ROBERT®, such that severely impaired bedridden patients, may receive rich and challenging therapy, with sufficient assistance, should it be necessary. As such, we have designed, implemented, and tested the ROBERT® platform in combination with other technologies such as electromyography and functional electrical stimulation, to expand the ROBERT® platform as a hybrid rehabilitation system. This way, we have developed strategies for allowing the patients to exercise as independently as possible with the hybrid rehabilitation system, while offering the possibility of administrating different levels of assistance, dependent on their current needs, based on an assist-as-needed approach.
The final system design is implemented on the ROBERT® platform by Life Science Robotics and is tested by Roessingh Research and Development on stroke patients.
Collaborators and Funding:
Life Science Robotics ApS
Roessingh Research and Development
This research was funded by a European subsidy, EUREKA, under Grant number E113693.
Duration: May 2020 → April 2023
Intelligent Hybrid Light Weight Tendon Based Exoskeleton for Severely Disabled Individuals (EXOTIC2)
Aim: The vision of the project is to initiate and strengthen application-oriented research in the use of robotics to increase the quality of life and independence of people with chronic disease who have severe paralysis due to amyotrophic lateral sclerosis, brain stem stroke, spinal cord injury and similar disorders.
Description: The project focuses on the development of exoskeleton systems, including a lightweight arm exoskeleton, which can support movements in a paralyzed user’s arm, so that the user can, for example, drink, eat, scratch or shake hands and thus have a more dignified, active and social life.
Different control systems based on muscle, tongue and brain signals will be implemented and combined to allow the user to control it in different ways, depending on how extensive the paralysis is. Different control methods may also be combined so that the exoskeletons can e.g. adjust to the progression of ALS. In addition, research will be done into making the exoskeleton intelligent, so that it can make some of the movements automatically.
The exo will incorporate lightweight 3D printed materials such as carbon based materials and tendon technologies.
Collaboration and Funding:
The research was funded by the Aage og Johanne Louis-Hansens Fund.
Duration: March 2021 → …
Intelligent hybrid control of an exoskeleton hand based on non invasive tongue interfacing combined with electrical muscle stimulation for restoration of hand function in paralyzed individuals (HyperHand)
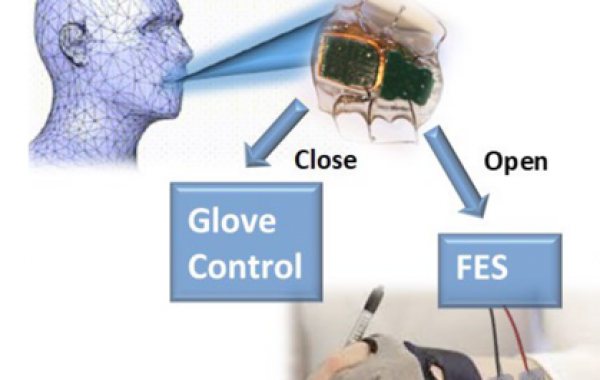
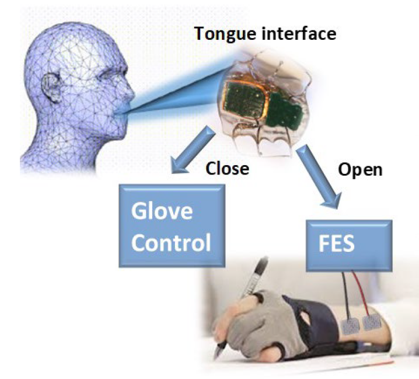
Aim: To develop a novel intelligent hybrid control method that combines non-invasive intelligent tongue control of soft hand exoskeletons to facilitate hand closure with functional electrical stimulation (FES) control of muscles to facilitate hand opening for the restoration of hand functions of individuals with spinal cord injury (SCI).
Description: Loss of hand function is devastating and its restoration is the top priority for individuals with paralysis. Globally, 3.300.000 people live with paralysis due to a stroke or SCI, which may cause hand paralysis, leading to low quality of life, risk of depression and a need for care. Exoskeleton hands have a strong potential to assist in daily activities. However, current systems are mainly activated through detection of motion or activity in hand related muscles, which is impossible for paralyzed users. Thus, HyperHand seeks to develop control methods that use the tongue to control the exoskeleton motors to grasp. To open the exoskeleton glove FES of the muscles that control the hand will be used, to avoid over extension of the fingers. The exoskeleton glove will adapt to the used grasps. Both the exoskeleton cables and the electrical stimulation can be activated using a new non-invasive intelligent tongue interface created.
Duration: January 2021 → January 2024
Intelligent device for tongue/finger control of an advanced wheelchair mounted assistive robotic arm (iTooBot)
Aim: The aim of iTooBot is to deliver a novel tongue/finger interface for control of an unique intelligent assistive robotic arm (ARM). iTooBot will be the world’s first device mapping tongue motions to ARM movements.
Description: Imagine not being able to move your arms and legs at all: to need a caregiver 24/7 for the rest of your life… Consider too, the growing lack of caregivers. If they could, 86% of the disabled people would buy an ARM. Therefore, we aim to make this possible and available. iTooBot is a stand-alone device allowing for tongue control of an assistive robotic manipulator for severely paralyzed individuals.
While most users have some idea of how traditional joysticks map hand motions into forwarding and backward movements of the controlled device, this is not the case for tongue control. iTooBot intuitively assigns the command signals to specific robot actions. Virtual sensor layouts for different sensor-robot mappings will be developed and tested in the computer-based iTooBot.
Kirstina Beatrice Persson Vestersøe, from DTU- Technical University of Denmark. Internship: A hybrid soft/rigid forearm exoskeleton.
Ana Sofia Santos Cardoso, ERASMUS student from Universidade do Porto, Protugal. Internship: BCI based control of assistive robotic arms
2019:
Arthur Camouseigt, ERASMUS student from École Nationale Supérieure de Techniques Avancées (ENSTA ParisTech), France, Internship: Advanced tongue based drone control for individual with tetraplegia.
Enric Casanova, ERASMUS student from Université Paris Descartes – Faculté des Sciences Fondamentales et Biomédicales, France, Internship, Master thesis project: The effect of a reduced range of shoulder abduction on the wrist kinematics – a design parameter for under-actuated arm exoskeletons.
2018:
Salheddine Ayad, Visiting Ph.D. student from University of Sidi-Bel-Abbes, Algeria: 3D Interactive Robotic Rehabilitation System
Key Collaborators
RYK – Interest organisation for people with spinal cord injuries
Life Science Robotics
Clinic for Spinal Cord Injury, Neurocentret Rigshospitalet
Research Department, Spinal Cord Injury Centre of Western Denmark
Aalborg University Hospital
BioRobotics Institute of the Scuola Superiore Sant’Anna, Pisa, Italy
TKS A/S, Denmark (Spin-off company from the Laboratory, developing tongue-based control systems)
Neurorehabilitation Engineering, Department of Bioengineering, Imperial College London, London, UK
RYK – Interest organisation for people with spinal cord injuries
Life Science Robotics
Clinic for Spinal Cord Injury, Neurocentret Rigshospitalet
Research Department, Spinal Cord Injury Centre of Western Denmark
Aalborg University Hospital
BioRobotics Institute of the Scuola Superiore Sant’Anna, Pisa, Italy
TKS A/S, Denmark (Spin-off company from the Laboratory, developing tongue-based control systems)
Neurorehabilitation Engineering, Department of Bioengineering, Imperial College London, London, UK
FTP Grant – MultiRob project: Multimodal control of assistive robotic arms for severely disabled individuals
EXOTIC: EXO with Tongue based Intelligent Control, Strategic Interdisciplinary project at Aalborg University
SMARTHAND: The Smart Bio-adaptive Hand Prosthesis, NMP4-CT-2006-0033423 (FP6 Strep project); Project coordinator name: Prof. Thomas Laurell, Lunds Universitet, Lund, Sweden; Project duration: 3 years (2006-2009)